使用 google colab 執行了幾個小時後,就彈出這一個畫面,說不能用 GPU 了。
Google 的「𥇧解詳情」:
https://research.google.com/colaboratory/faq.html#usage-limits
What are the usage limits of Colab?
Colab is able to provide free resources in part by having dynamic usage limits that sometimes fluctuate, and by not providing guaranteed or unlimited resources. This means that overall usage limits as well as idle timeout periods, maximum VM lifetime, GPU types available, and other factors vary over time. Colab does not publish these limits, in part because they can (and sometimes do) vary quickly.
GPUs and TPUs are sometimes prioritized for users who use Colab interactively rather than for long-running computations, or for users who have recently used less resources in Colab. As a result, users who use Colab for long-running computations, or users who have recently used more resources in Colab, are more likely to run into usage limits and have their access to GPUs and TPUs temporarily restricted. Users with high computational needs may be interested in using Colab’s UI with a local runtime running on their own hardware. Users interested in having higher and more stable usage limits may be interested in Colab Pro.
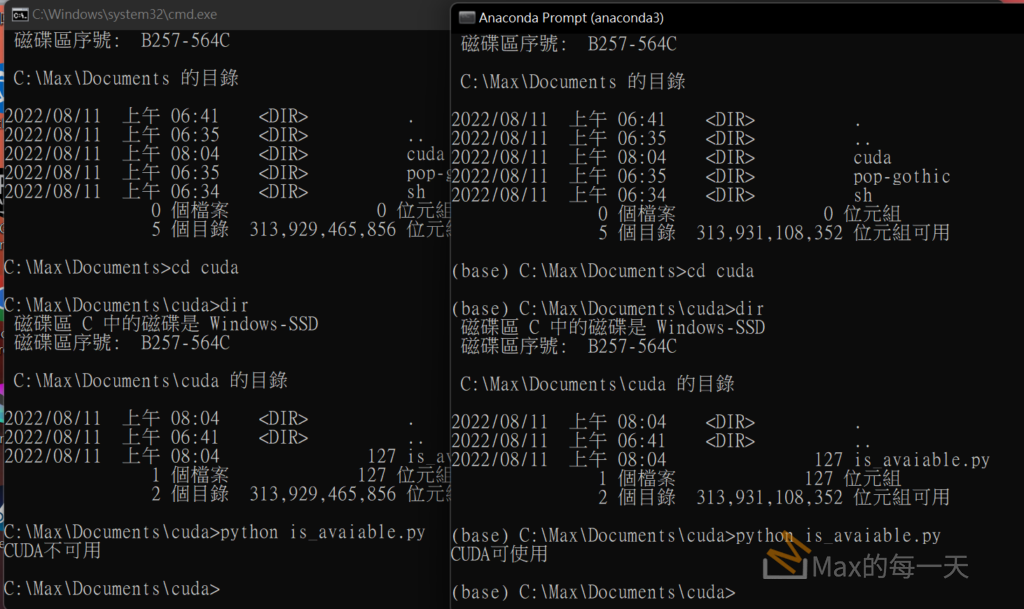
只好切換目前程式,改用 CPU,如果沒有調整程式,直接再執行一次會顯示下面的錯誤訊息:
File "/Library/Frameworks/Python.framework/Versions/3.9/lib/python3.9/site-packages/torch/serialization.py", line 135, in validate_cuda_device
raise RuntimeError('Attempting to deserialize object on a CUDA '
RuntimeError: Attempting to deserialize object on a CUDA device but torch.cuda.is_available() is False. If you are running on a CPU-only machine, please use torch.load with map_location=torch.device('cpu') to map your storages to the CPU.
切換的方式,滿簡單的,找到 torch.load 再增加參數:
map_location=torch.device('cpu')
問題就解決了,相關的語法:
https://pytorch.org/tutorials/beginner/saving_loading_models.html
When it comes to saving and loading models, there are three core functions to be familiar with:
- torch.save: Saves a serialized object to disk. This function uses Python’s pickle utility for serialization. Models, tensors, and dictionaries of all kinds of objects can be saved using this function.
- torch.load: Uses pickle’s unpickling facilities to deserialize pickled object files to memory. This function also facilitates the device to load the data into (see Saving & Loading Model Across Devices).
- torch.nn.Module.load_state_dict: Loads a model’s parameter dictionary using a deserialized state_dict. For more information on state_dict, see What is a state_dict?.
Contents:
- What is a state_dict?
- Saving & Loading Model for Inference
- Saving & Loading a General Checkpoint
- Saving Multiple Models in One File
- Warmstarting Model Using Parameters from a Different Model
- Saving & Loading Model Across Devices
What is a state_dict?
In PyTorch, the learnable parameters (i.e. weights and biases) of an torch.nn.Module model are contained in the model’s parameters (accessed with model.parameters()). A state_dict is simply a Python dictionary object that maps each layer to its parameter tensor. Note that only layers with learnable parameters (convolutional layers, linear layers, etc.) and registered buffers (batchnorm’s running_mean) have entries in the model’s state_dict. Optimizer objects (torch.optim) also have a state_dict, which contains information about the optimizer’s state, as well as the hyperparameters used.
Because state_dict objects are Python dictionaries, they can be easily saved, updated, altered, and restored, adding a great deal of modularity to PyTorch models and optimizers.
Example:
Let’s take a look at the state_dict from the simple model used in the Training a classifier tutorial.
# Define model
class TheModelClass(nn.Module):
def __init__(self):
super(TheModelClass, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# Initialize model
model = TheModelClass()
# Initialize optimizer
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
# Print model's state_dict
print("Model's state_dict:")
for param_tensor in model.state_dict():
print(param_tensor, "\t", model.state_dict()[param_tensor].size())
# Print optimizer's state_dict
print("Optimizer's state_dict:")
for var_name in optimizer.state_dict():
print(var_name, "\t", optimizer.state_dict()[var_name])
Output:
Model's state_dict:
conv1.weight torch.Size([6, 3, 5, 5])
conv1.bias torch.Size([6])
conv2.weight torch.Size([16, 6, 5, 5])
conv2.bias torch.Size([16])
fc1.weight torch.Size([120, 400])
fc1.bias torch.Size([120])
fc2.weight torch.Size([84, 120])
fc2.bias torch.Size([84])
fc3.weight torch.Size([10, 84])
fc3.bias torch.Size([10])
Optimizer's state_dict:
state {}
param_groups [{'lr': 0.001, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [4675713712, 4675713784, 4675714000, 4675714072, 4675714216, 4675714288, 4675714432, 4675714504, 4675714648, 4675714720]}]
Saving & Loading Model for Inference
Save/Load state_dict (Recommended)
Save:
torch.save(model.state_dict(), PATH)
Load:
model = TheModelClass(*args, **kwargs) model.load_state_dict(torch.load(PATH)) model.eval()
NOTE
The 1.6 release of PyTorch switched torch.save to use a new zipfile-based file format. torch.load still retains the ability to load files in the old format. If for any reason you want torch.save to use the old format, pass the kwarg _use_new_zipfile_serialization=False.
When saving a model for inference, it is only necessary to save the trained model’s learned parameters. Saving the model’s state_dict with the torch.save() function will give you the most flexibility for restoring the model later, which is why it is the recommended method for saving models.
A common PyTorch convention is to save models using either a .pt or .pth file extension.
Remember that you must call model.eval() to set dropout and batch normalization layers to evaluation mode before running inference. Failing to do this will yield inconsistent inference results.
NOTE
Notice that the load_state_dict() function takes a dictionary object, NOT a path to a saved object. This means that you must deserialize the saved state_dict before you pass it to the load_state_dict() function. For example, you CANNOT load using model.load_state_dict(PATH).
NOTE
If you only plan to keep the best performing model (according to the acquired validation loss), don’t forget that best_model_state = model.state_dict() returns a reference to the state and not its copy! You must serialize best_model_state or use best_model_state = deepcopy(model.state_dict()) otherwise your best best_model_state will keep getting updated by the subsequent training iterations. As a result, the final model state will be the state of the overfitted model.
Save/Load Entire Model
Save:
torch.save(model, PATH)
Load:
# Model class must be defined somewhere model = torch.load(PATH) model.eval()
This save/load process uses the most intuitive syntax and involves the least amount of code. Saving a model in this way will save the entire module using Python’s pickle module. The disadvantage of this approach is that the serialized data is bound to the specific classes and the exact directory structure used when the model is saved. The reason for this is because pickle does not save the model class itself. Rather, it saves a path to the file containing the class, which is used during load time. Because of this, your code can break in various ways when used in other projects or after refactors.
A common PyTorch convention is to save models using either a .pt or .pth file extension.
Remember that you must call model.eval() to set dropout and batch normalization layers to evaluation mode before running inference. Failing to do this will yield inconsistent inference results.
Saving & Loading a General Checkpoint for Inference and/or Resuming Training
Save:
torch.save({
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': loss,
...
}, PATH)
Load:
model = TheModelClass(*args, **kwargs) optimizer = TheOptimizerClass(*args, **kwargs) checkpoint = torch.load(PATH) model.load_state_dict(checkpoint['model_state_dict']) optimizer.load_state_dict(checkpoint['optimizer_state_dict']) epoch = checkpoint['epoch'] loss = checkpoint['loss'] model.eval() # - or - model.train()
When saving a general checkpoint, to be used for either inference or resuming training, you must save more than just the model’s state_dict. It is important to also save the optimizer’s state_dict, as this contains buffers and parameters that are updated as the model trains. Other items that you may want to save are the epoch you left off on, the latest recorded training loss, external torch.nn.Embedding layers, etc. As a result, such a checkpoint is often 2~3 times larger than the model alone.
To save multiple components, organize them in a dictionary and use torch.save() to serialize the dictionary. A common PyTorch convention is to save these checkpoints using the .tar file extension.
To load the items, first initialize the model and optimizer, then load the dictionary locally using torch.load(). From here, you can easily access the saved items by simply querying the dictionary as you would expect.
Remember that you must call model.eval() to set dropout and batch normalization layers to evaluation mode before running inference. Failing to do this will yield inconsistent inference results. If you wish to resuming training, call model.train() to ensure these layers are in training mode.
Saving Multiple Models in One File
Save:
torch.save({
'modelA_state_dict': modelA.state_dict(),
'modelB_state_dict': modelB.state_dict(),
'optimizerA_state_dict': optimizerA.state_dict(),
'optimizerB_state_dict': optimizerB.state_dict(),
...
}, PATH)
Load:
modelA = TheModelAClass(*args, **kwargs) modelB = TheModelBClass(*args, **kwargs) optimizerA = TheOptimizerAClass(*args, **kwargs) optimizerB = TheOptimizerBClass(*args, **kwargs) checkpoint = torch.load(PATH) modelA.load_state_dict(checkpoint['modelA_state_dict']) modelB.load_state_dict(checkpoint['modelB_state_dict']) optimizerA.load_state_dict(checkpoint['optimizerA_state_dict']) optimizerB.load_state_dict(checkpoint['optimizerB_state_dict']) modelA.eval() modelB.eval() # - or - modelA.train() modelB.train()
When saving a model comprised of multiple torch.nn.Modules, such as a GAN, a sequence-to-sequence model, or an ensemble of models, you follow the same approach as when you are saving a general checkpoint. In other words, save a dictionary of each model’s state_dict and corresponding optimizer. As mentioned before, you can save any other items that may aid you in resuming training by simply appending them to the dictionary.
A common PyTorch convention is to save these checkpoints using the .tar file extension.
To load the models, first initialize the models and optimizers, then load the dictionary locally using torch.load(). From here, you can easily access the saved items by simply querying the dictionary as you would expect.
Remember that you must call model.eval() to set dropout and batch normalization layers to evaluation mode before running inference. Failing to do this will yield inconsistent inference results. If you wish to resuming training, call model.train() to set these layers to training mode.
Warmstarting Model Using Parameters from a Different Model
Save:
torch.save(modelA.state_dict(), PATH)
Load:
modelB = TheModelBClass(*args, **kwargs) modelB.load_state_dict(torch.load(PATH), strict=False)
Partially loading a model or loading a partial model are common scenarios when transfer learning or training a new complex model. Leveraging trained parameters, even if only a few are usable, will help to warmstart the training process and hopefully help your model converge much faster than training from scratch.
Whether you are loading from a partial state_dict, which is missing some keys, or loading a state_dict with more keys than the model that you are loading into, you can set the strict argument to False in the load_state_dict() function to ignore non-matching keys.
If you want to load parameters from one layer to another, but some keys do not match, simply change the name of the parameter keys in the state_dict that you are loading to match the keys in the model that you are loading into.
Saving & Loading Model Across Devices
Save on GPU, Load on CPU
Save:
torch.save(model.state_dict(), PATH)
Load:
device = torch.device('cpu')
model = TheModelClass(*args, **kwargs)
model.load_state_dict(torch.load(PATH, map_location=device))
When loading a model on a CPU that was trained with a GPU, pass torch.device('cpu') to the map_location argument in the torch.load() function. In this case, the storages underlying the tensors are dynamically remapped to the CPU device using the map_location argument.
Save on GPU, Load on GPU
Save:
torch.save(model.state_dict(), PATH)
Load:
device = torch.device("cuda")
model = TheModelClass(*args, **kwargs)
model.load_state_dict(torch.load(PATH))
model.to(device)
# Make sure to call input = input.to(device) on any input tensors that you feed to the model
When loading a model on a GPU that was trained and saved on GPU, simply convert the initialized model to a CUDA optimized model using model.to(torch.device('cuda')). Also, be sure to use the .to(torch.device('cuda')) function on all model inputs to prepare the data for the model. Note that calling my_tensor.to(device) returns a new copy of my_tensor on GPU. It does NOT overwrite my_tensor. Therefore, remember to manually overwrite tensors: my_tensor = my_tensor.to(torch.device('cuda')).
Save on CPU, Load on GPU
Save:
torch.save(model.state_dict(), PATH)
Load:
device = torch.device("cuda")
model = TheModelClass(*args, **kwargs)
model.load_state_dict(torch.load(PATH, map_location="cuda:0")) # Choose whatever GPU device number you want
model.to(device)
# Make sure to call input = input.to(device) on any input tensors that you feed to the model
When loading a model on a GPU that was trained and saved on CPU, set the map_location argument in the torch.load() function to cuda:device_id. This loads the model to a given GPU device. Next, be sure to call model.to(torch.device('cuda')) to convert the model’s parameter tensors to CUDA tensors. Finally, be sure to use the .to(torch.device('cuda')) function on all model inputs to prepare the data for the CUDA optimized model. Note that calling my_tensor.to(device) returns a new copy of my_tensor on GPU. It does NOT overwrite my_tensor. Therefore, remember to manually overwrite tensors: my_tensor = my_tensor.to(torch.device('cuda')).
Saving torch.nn.DataParallel Models
Save:
torch.save(model.module.state_dict(), PATH)
Load:
# Load to whatever device you want
torch.nn.DataParallel is a model wrapper that enables parallel GPU utilization. To save a DataParallel model generically, save the model.module.state_dict(). This way, you have the flexibility to load the model any way you want to any device you want.